In this post we want to explore how data acquisition for the torpedo data computer can be supported with basic information from the periscope.
Angle on bow

It is easy to see the percieved length is composed of the projection
of the length and beam onto the observer plane.
Hence
(1) 
where  is the lenght,
is the lenght,  the beam and
the beam and  the percieved length.
the percieved length.
It is possible to find four different  ‘s for a specific (As we will see later for some there are actually eight solutions). If is a solution
‘s for a specific (As we will see later for some there are actually eight solutions). If is a solution  are also solutions. The correct one can be determined by recognizing the aspect of the target, the cartesian product of ([starboard, port], [hot, cold]), where ‘starboard’ means
are also solutions. The correct one can be determined by recognizing the aspect of the target, the cartesian product of ([starboard, port], [hot, cold]), where ‘starboard’ means ![\alpha \in [0, \pi]](https://camus.cat/wp-content/ql-cache/quicklatex.com-691b4bfd732b1de613c5638783807a70_l3.png "Rendered by QuickLaTeX.com") and ‘hot’ means
and ‘hot’ means ![\alpha \in [\pi/2, 3\pi/2]](https://camus.cat/wp-content/ql-cache/quicklatex.com-2aada53c1a4d0ae83d7326e592760eec_l3.png "Rendered by QuickLaTeX.com") and the others the according complement to each other. So each specific product coresponds to one of the quadrants and each quadrant has one or two solution for .
and the others the according complement to each other. So each specific product coresponds to one of the quadrants and each quadrant has one or two solution for .
We can solve (1) for with some basic math.
(2) 
or if we limit ![\alpha \in [0, \pi/2]](https://camus.cat/wp-content/ql-cache/quicklatex.com-a80015db254a75bb184f971e619a22c5_l3.png "Rendered by QuickLaTeX.com")
(3) 


 ratio the overlapping interval becomes smaller. A typical value for a ship is at least 5.
ratio the overlapping interval becomes smaller. A typical value for a ship is at least 5.With  and with
and with  for
for 
(4) 
(5) 
Squarring both sides results in
(6) 
This turns in a quadratic equation for  .
.
(7) 
which can be solved with infamous quadratic formula  for
for  .
.
(8) 
Now we need to figure out which solution is valid in which interval. For that we determin the limits.
(9) 
(10) 
This is the correct result for  .
.
(11) 
So for  the term does not diverge and does not become
the term does not diverge and does not become  . This means
. This means  is definitely not valid for close to . Looking at
is definitely not valid for close to . Looking at  reveals
reveals
(12) 
(13) 
with 
(14) 
This is not the result we want for . But we already demonstrated the validity of in this region.
For
(15) 
shows the right result.
The last relation we need is the point of equality of and .
(16) 

 . Red is the valid range of and green the one of . As increases the range of becomes smaller.
. Red is the valid range of and green the one of . As increases the range of becomes smaller.To make sure this equation does not break we need to intercept any vaue of and  so the denominator does not become 0 nore the argument of the root negative. This also makes sense in a physical way since can not be geometrically larger than
so the denominator does not become 0 nore the argument of the root negative. This also makes sense in a physical way since can not be geometrically larger than  .
.
Now we need to estimate the propagation of uncertainty. For uncorrelated small uncertainties we can use the approximation  . In case of
. In case of  we assume and are stored in a database and will be assigned with the correct identification of the ship and have no uncertainty. The only uncertainty left is so
we assume and are stored in a database and will be assigned with the correct identification of the ship and have no uncertainty. The only uncertainty left is so  .
.
(17) 
Now this looks quiet bad but fortunally we can simplify it to
(18) 
. Luckily we end up with just one fraction, but it still has a short coming. For  the term diverges which makes sense since for a infinitesimal change
the term diverges which makes sense since for a infinitesimal change  at , does not change at all. This is obvious because
at , does not change at all. This is obvious because  at
at  as it is a local maximum.
as it is a local maximum.
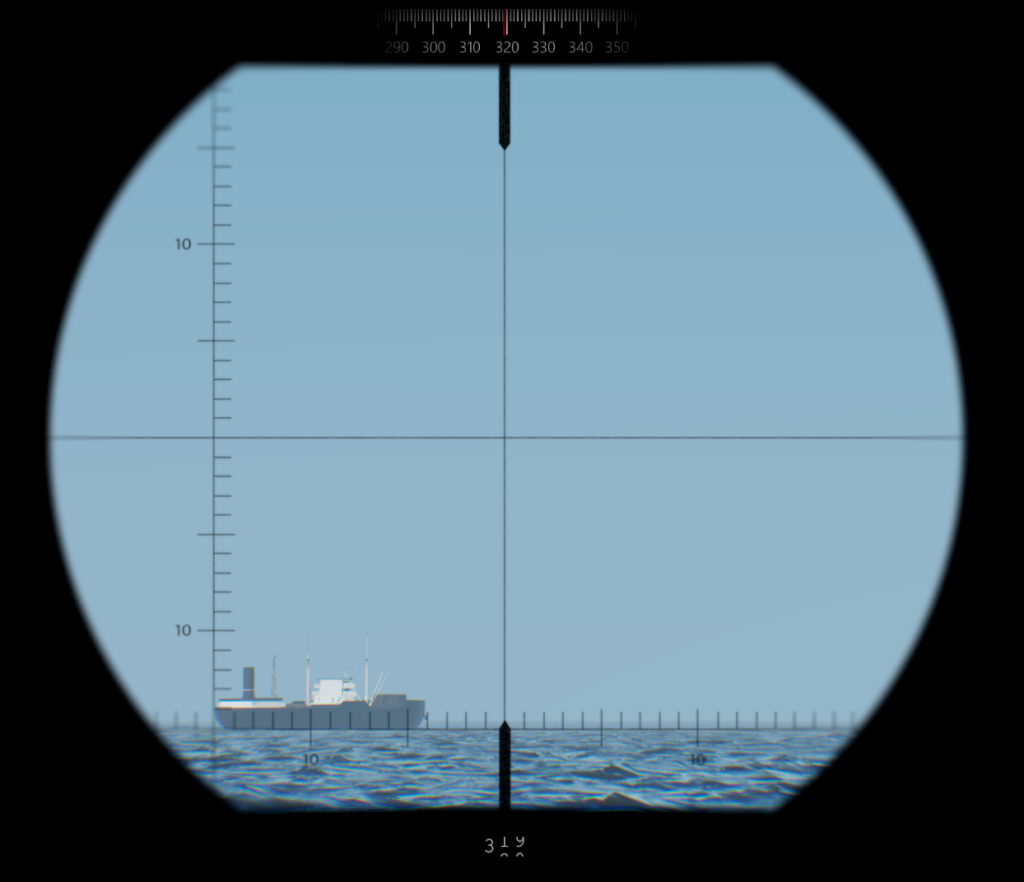
So the only quantity which needs to be measured with the periscope to deterine the angle on bow is the percieved length. This can be done by
(19) 
where  is the horizontal size of the target in periscope bars,
is the horizontal size of the target in periscope bars,  the vertical size of the target in periscope bars and
the vertical size of the target in periscope bars and  the mast height of the target known by correct indentification. The uncertainty is
the mast height of the target known by correct indentification. The uncertainty is
(20) 
if we assume  and
and  are uncorrelated which is definitely not true (some positive correlation because of the change of distance of the target), but we will neglect this for now.
are uncorrelated which is definitely not true (some positive correlation because of the change of distance of the target), but we will neglect this for now.
The next step is the sanitization of
(21) 
and the computation of . The observer must decide which is more appropriate.
(22) 
(23) 
The uncertainty is
(24) 
where  is a fixed maximum uncertainty.
is a fixed maximum uncertainty.
Distance
As luck would have it the computation of distance is more straight forward.
(25) 
where is the mast height of the ship, the vertical size in bars of the ship in the periscope and  a constant that needs to be determined based on the periscope and its zoom setting.
a constant that needs to be determined based on the periscope and its zoom setting.
The uncertainty is
(26) 
.
Velocity
The basic idea for a fast velocity measurement method is to let pass a certain time and count how many , hence horizontal bars in the periscope the target traversed. Since we measure the velocity via the periscope it makes sense to switch to an eukledian coordinate system which has  parallel to and
parallel to and  parallel to the distance vector to the target.
parallel to the distance vector to the target.

is the angle on bow,  the periscope heading,
the periscope heading,  the velocity of the observer and
the velocity of the observer and  the velocity of the target. With the periscope we can only measure the component of
the velocity of the target. With the periscope we can only measure the component of  . To find the absolute speed of the target we first need to isolate the effect of the movment of the observer
. To find the absolute speed of the target we first need to isolate the effect of the movment of the observer
(27) 
and
(28) 
where  is the time required to travel
is the time required to travel  horizontal bars in the periscope and
horizontal bars in the periscope and  is the velocity of the target in the periscope
is the velocity of the target in the periscope
In order to get the absolut velocity of the target in direction we just need to add both components
(29) 
and the total target velocity is
(30) 
The uncertainty of is dependend on quiet a lot of variables so the formula gets quiet long
(31) 
This formula is not quiet correct since  correlates with but at this point I simply assumed the effects are negligible.
correlates with but at this point I simply assumed the effects are negligible.
Closest approach and optimal intercept course
Since all relevant data of the target is available now we can add some further features. We can define a cartesian coordinate system with parallel to the heading of the observer and perpendicular to it.
The time depended position vector of the observer
(32) 
and of the target
(33) 
can be expressed this way. The distance is
(34) 
To get the closest approach for a set and we simply derive  by to find the minimum of at
by to find the minimum of at  .
.
(35) 
At the minimum this partial derivative is 0, hence
(36) 
and
(37) 
To derive this equation we could have also used the geometric method. At the closest approach the velocity vector is orthogonal on the distance vector.
(38) 
(39) 
The dot product
(40) 
is simply 0 and we obtain the same formula for .
If we want to optimize to find the optimal intercept course we get a two dimensional function  and also need the partial derivative by
and also need the partial derivative by
(41) 
 ,
,  and
and 
(42) 
. Unfortunately there is no analytical way to solve and with equation (36) and (42)
 and .
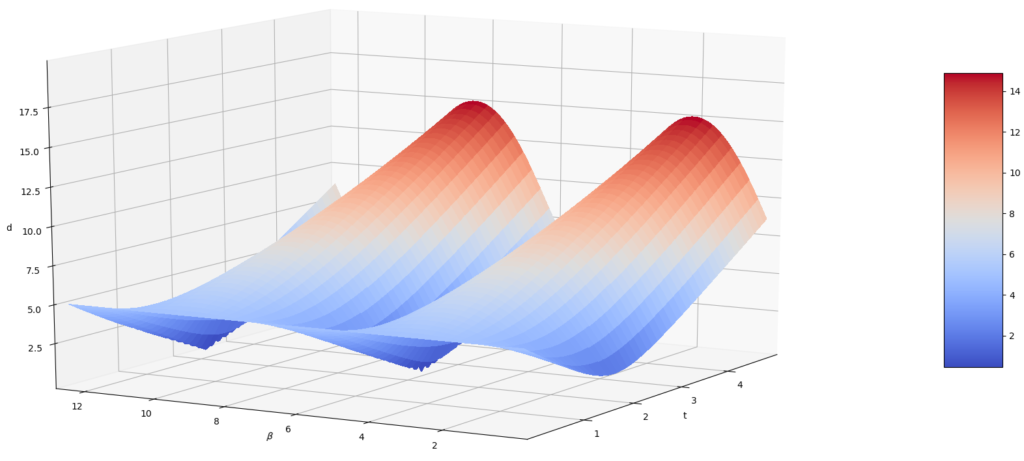
and .The distance function has clearly a  periodicity in the direction. The mimimum it self looks quiet well behaved without any local minimum traps and the gradient basically always points towards the minimum which should make a numerical optimization quiet effective. To speed it up we can define the gradient and Hessian matrix and use
periodicity in the direction. The mimimum it self looks quiet well behaved without any local minimum traps and the gradient basically always points towards the minimum which should make a numerical optimization quiet effective. To speed it up we can define the gradient and Hessian matrix and use  to get rid of taking square roots.
to get rid of taking square roots.
(43) 
(44) 
(45) 
This is obviously far more computationally intensive than a simple analytic formula. Luckily a triangle can save us if  .
.

At first this triangle does not seem to usefull since we only know the distance  and the angle on bow . the other legs depend on . But with the law of sines and knowing, that the ratio
and the angle on bow . the other legs depend on . But with the law of sines and knowing, that the ratio  stays constant
stays constant
(46) 
(47) 
If  it means there is no intercept course with and we need to fall back to the iterative optimization method.
it means there is no intercept course with and we need to fall back to the iterative optimization method.
Bonus: Torpedo hit probability
With (47) we can also analytically compute the optimal torpedo launch angle if we replace with the torpedo velocity. The launch angle is also refered to as gyro angle  .
.
(48) 
If we plug in from (30)
(49) 
and use (36) for the torpedo trajectory
(50) 
we know the optimal launch angle and travel time of the torpedo.
If we compute the uncertainties  and
and  and compare those to the approximate angular size of the target
and compare those to the approximate angular size of the target
(51) 
and the maximum travel time of the torpedo  we can determine the hit probability.
we can determine the hit probability.
(52) 
with
(53) 
(54) 